暨南大学融媒体中心讯 近日,化学与材料学院王吉壮/李丹团队开发了一种通过体相异质结有机半导体太阳能电池(OSC)的旋涂技术随意构造光驱动功能微机器人的新方法,能够在各种维度结构(0D、1D、2D、3D)上实现高效光驱动功能微机器人的设计构造。相关工作以“Arbitrary construction of versatile NIR-driven microrobots”为题发表在国际权威期刊Advanced Materials。
在微纳机器人发展的历程中,我们见证了其从初期的简单化学驱动逐步演变到如今的复杂功能集成。随着研究的不断深入,科学家们逐渐将多种功能整合到微纳机器人设计中,使其具备了更加复杂和多样的特性。光驱动微纳机器人(LMNRs)因其可编程性和高效驱动,成为该领域的研究热点之一。光作为一种高度可调制的信号源,具有独特优势,能够通过编程实现入射方向、强度、波长和偏振等多信号通道的控制,使得精准操控微纳机器人以执行复杂任务成为可能。光驱动方式提供了更高的灵活性和可控性,使微纳机器人在生物医学、环境监测和工业制造等领域展现出巨大的应用潜力。然而,尽管光驱动微纳机器人在许多方面表现出色,实现简单且通用的设计构造依然是一大挑战。因此,如何根据功能需求灵活构建相应结构的微纳机器人,并开发出更简便且通用的设计策略,成为当前研究的重点方向。
本工作中,作者将高效光电转换性能的体相异质结有机半导体太阳能电池(OSC)与灵活构造的旋涂技术相结合,可以将不同结构的惰性模版,包括各种维度结构(0D、1D、2D、3D),进行旋涂活化,从而实现随意构造的光驱动功能微机器人的全新设计方法(图1)。
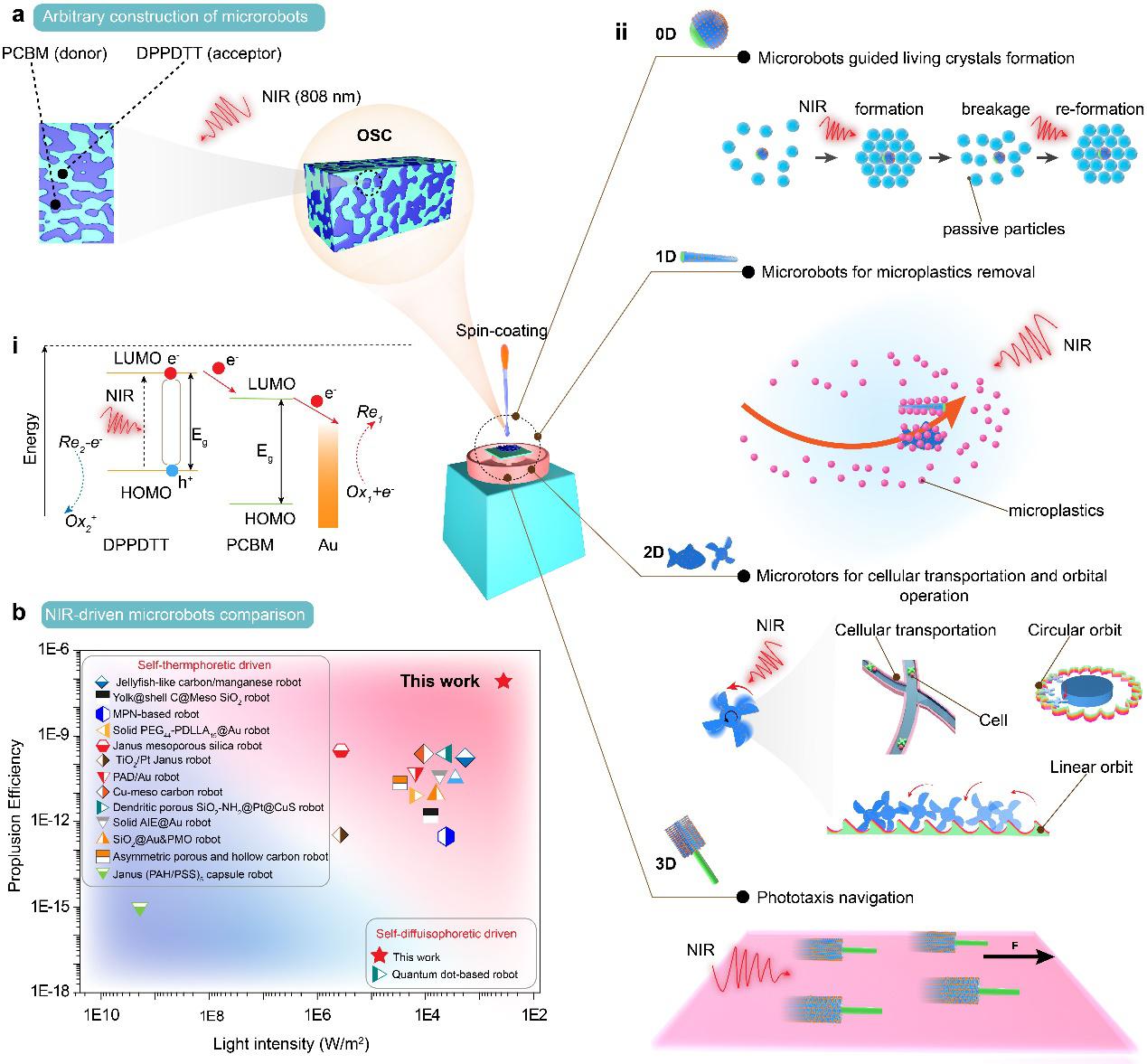
图1. 零维到三维NIR驱动微纳机器人的构筑。
该微纳机器人的驱动机制主要依靠近红外光驱动的光电化学反应所引发的自扩散泳动(self-diffusiophoresis)(图2)。具体来说,涂层薄膜通过吸收NIR光,驱动光电化学反应,形成离子浓度梯度,从而推动微纳机器人的运动。这种自扩散泳动机制使得微纳机器人能够在NIR光照下实现高效的定向运动。
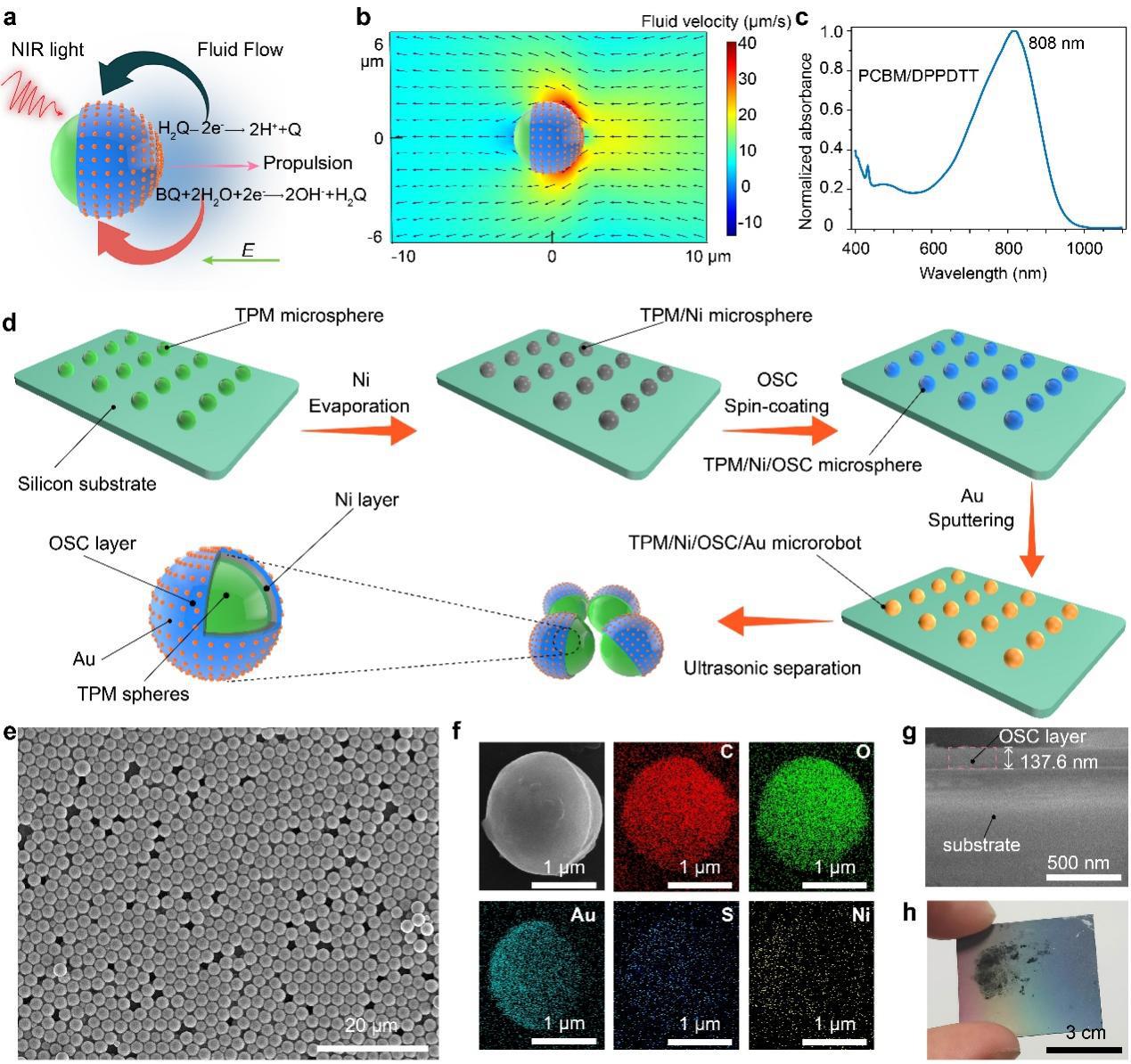
图2. 0D微型机器人的驱动机制、制造工艺和结构表征。
该方法利用旋涂技术将近红外响应的OSC溶液涂覆在任意被动结构上,从而赋予其运动能力。由于涂层薄膜极其纤薄,原始物体的形态和功能得以保留,实现了功能与结构的完美融合。不同维度的微纳机器人在不同应用领域中展示出显著优势(图3):
- 0D 微纳机器人:适用于活性晶体的生成。
- 1D和2D 微纳机器人:在微塑料捕捉和管道模型中的货物运输方面表现优异(图4)。
- 3D 微纳机器人:具有光控导航能力,能够在复杂环境中实现精确的光学操控和导航。
图3. 0D~3D微纳机器人的多功能应用示意图。
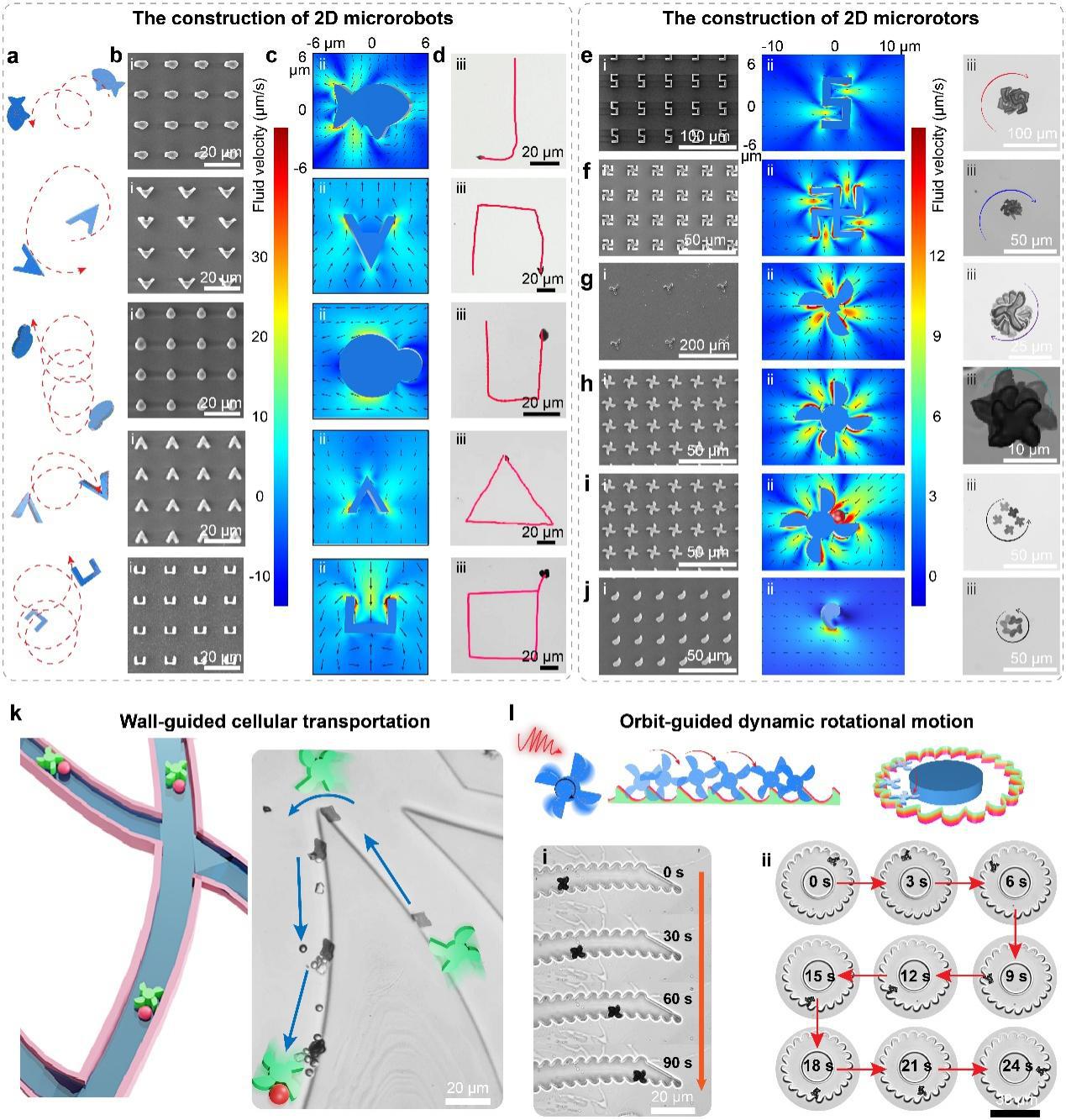
图4. 2D随机可设计结构微纳机器人在近红外(NIR)照射下的运动行为,包括:二维微纳机器人和具有多种旋转对称结构微转子的设计、货物运输及轨道引导的运动行为。
总的来说,该工作开发了一种全新的构筑策略,通过旋涂技术利用体异质结有机光伏(OSC)结构,任意构建从0D到3D的微机器人。在近红外(NIR)照射下,这些基于OSC的微机器人展示了多种自扩散泳运动行为。研究发现,不同的结构设计会引发不同的运动模式,包括定向运动和旋转运动,尤其是在具有多重旋转对称结构的微转子中观察到了运动行为的转变。此外,该方法能够根据特定功能需求定制微机器人的制造:0D微机器人可用于诱导活晶体形成,1D和2D微机器人用于去除微塑料,微转子用于精确的齿轮啮合和货物运输,而3D纳米树机器人则展示了趋光导航的能力。旋涂体相异质结OSC技术还可拓展至其他的有机半导体体系,体现了其广泛的适用性,其特异性的功能化应用突显了光驱动微纳机器人在多个领域中的潜在应用前景。
论文第一作者为暨南大学博士生李万元,通讯作者为王吉壮副教授和李丹教授,香港大学的唐晋尧教授团队也参与研究。该论文得到了国家自然科学基金、国家自然科学基金重点项目、广东省重大基础与应用基础计划和暨南大学等的大力支持。
原文链接:https://onlinelibrary.wiley.com/doi/abs/10.1002/adma.202402482。
责编:杜明灿















