暨南大学融媒体中心讯 近日,美国化学会新闻周刊(ACS News Service Weekly PressPac)以“Four legged, dog-like robot “sniffs” out hazardous gases in inaccessible environments”(仿生四足机器人“嗅出”危险环境的有害气体)为题,报道了暨南大学环境与气候学院胡斌副研究员及其合作团队的最新研究成果(Anal. Chem., 2024,96, 9325-9331)。这是美国化学会新闻周刊继2020年报道了胡斌课题组团队的研究工作之后再度报道该课题组的研究进展,两次均被国际国内多家科技媒体相继报道和转载,引起了学术界的关注。
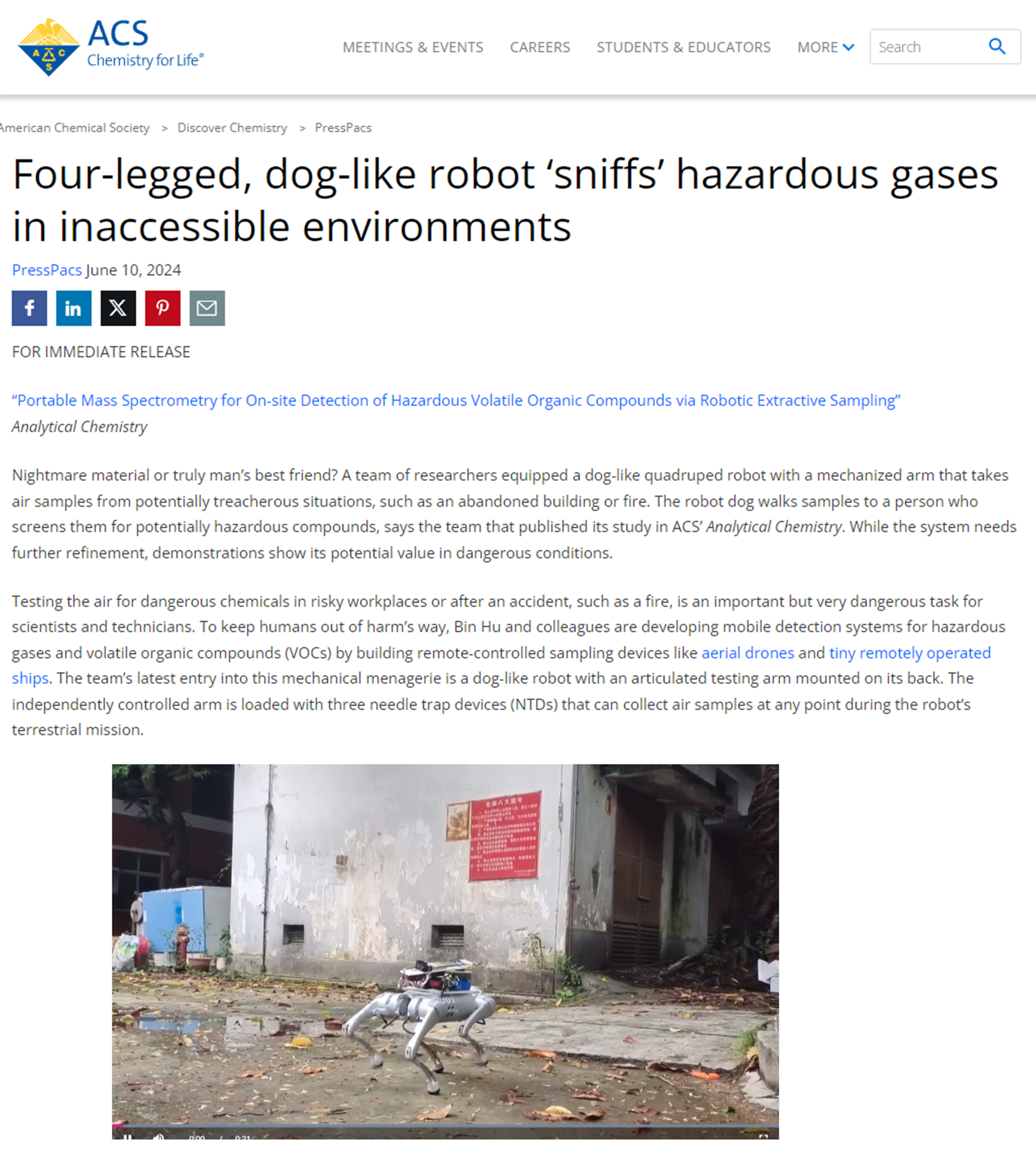
(美国化学会新闻周刊报道部分截图)
现场采样与精准分析对于及时掌握环境污染重大重点风险源的状况及分布至关重要,并为实施现场应急处置、全过程动态监测、以及风险防控管理提供科学决策。然而,现有的分析装置与方法对复杂环境现场分析需求的检测能力、安全性、便携性和通用性极具挑战。特别地,危化环境的现场分析极具紧迫性和重要性,人员现场采样与分析作业具有极大的安全风险。长期以来,如何发展适用于危化环境现场分析需求的新技术与方法学一直是分析科学的难题。针对这个难题,胡斌研究团队发展了一种新型机器人质谱系统(Robot-MS),通过远程遥控机器人进入危化环境并控制机械臂采样阵列,可实现对多个目标区域的痕量有毒有害挥发性有机化合物的快速采集,然后通过便携式气相色谱质谱现场快速分离分析,从而实现快速定性定量测定复杂环境中的危化污染物。该研究系统考察了Robot-MS系统的分析性能、环境适用性和现场分析能力,验证了在楼梯、不规则地面、草地、狭小空间等场景下的机器人采样,并展示了在人员不宜进入的化学品泄漏、烟雾、燃烧、以及模拟化学战剂等有毒有害和易燃易爆气体的危化环境的机器人采样与质谱分析。
该报道还引述链接了胡斌及其合作团队在无人机质谱(Environ. Sci. Technol., 2022, 56, 17100-17107)与无人船质谱(Environ. Sci. Technol., 2023, 57, 20864-20870)的研究进展。这些工作是该团队在智能机器人质谱研究系列工作的阶段性进展,该系列工作旨在发展新型智能机器人质谱分析系统,在智能、安全、便捷、精准等多个维度上发展新的方法学,解决常规方法不能进入化学危害、生物危害、放射性等极端环境分析的难题,全面提升解决现场监测的能力,为精准理解复杂环境污染物的赋存形态与发展变化机制提供方法学基础,从而为日益增长的大气、水体、陆地等复杂环境的现场分析需求提供新装置和新技术,也为生命健康分析研究提供新方法和新思路。
暨南大学硕士研究生刘希萌和黄乔芸为该论文的共同第一作者,胡斌副研究员为通讯作者。该研究工作部分受到国家自然科学基金和广州市科技计划资助,并期待更多研究资助机构参与支持该系列工作的开展。
胡斌课题组长期从事环境与生命健康质谱分析的装置研制和方法学研究,发表论文100余篇,H指数33,入选全球前2%顶尖科学家年度榜单,是Science等顶级期刊审稿人,以第一完成人获2022年中国分析测试协会科学技术奖(CAIA奖)一等奖。
(论文封面图)
美国化学会新闻周刊链接:https://www.acs.org/pressroom/presspacs/2024/june/four-legged-dog-like-robot-sniffs-hazardous-gases.html
论文链接:https://pubs.acs.org/doi/10.1021/acs.analchem.4c01555
责编:李伟苗